Check Out
↓
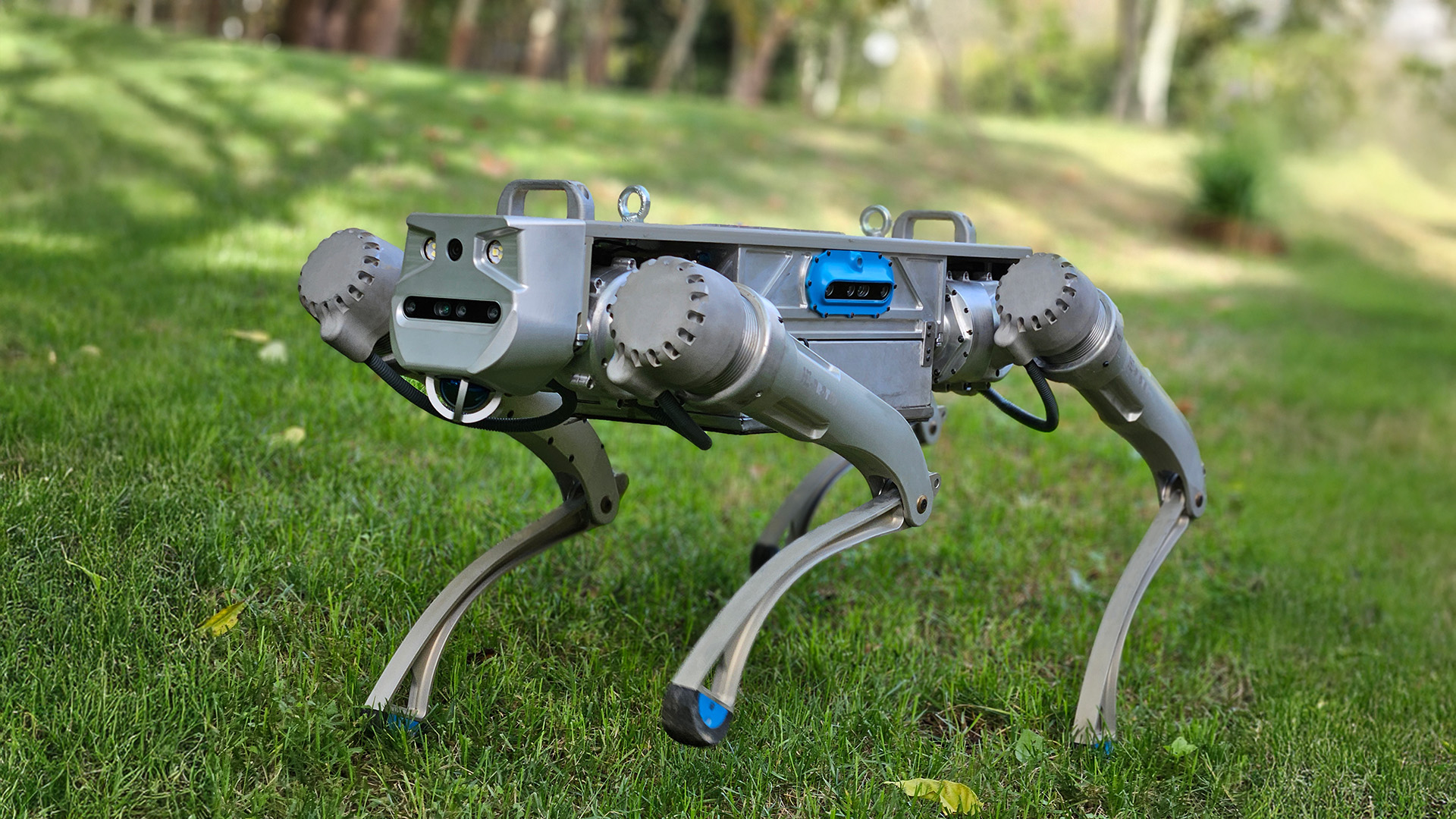
Proteo can be used in smart facilities to monitor and control the environment.
Proteo can be used in warehouses to transport goods and materials.
Proteo can overcome dangerous environments and perform tasks that are too risky for humans.